Geodaten
Sorgen Sie mit CHC Navigation für Genauigkeit bei Ihren Geodatenprojekten.
Erfahren Sie mehr + Weiter mit Geodaten2022-08-19
Die Verwaltung großer Wasserspeicher kann im Laufe der Zeit zu einer Herausforderung werden, da ungenaue oder veraltete geografische Informationen zu Diskrepanzen zwischen den tatsächlichen und den ursprünglichen Planungsdaten führen. Für eine wirksame Instandhaltung von Stauseen ist der Einsatz fortschrittlicher Messmethoden, wie z. B. die Kartierung mit LiDAR-Scannern und unbemannten Fahrzeugen, unabdingbar, um rechtzeitig eine genaue Überwachung und Berechnung des Wasserspeichervolumens sowie eine Vorhersage und Simulation der hydrologischen Bedingungen zu ermöglichen.
ÜBER DAS PROJEKT
In diesem eintägigen Projekt wurde gezeigt, dass der Einsatz eines hydrographischen USV für die Unterwasserkartierung und eines mit einem LiDAR-Scanner ausgestatteten UAV für die Erfassung von Stauseegrenzen und topographischen Daten zu einer vereinfachten und effizienten Bewirtschaftung großer Wasserspeicher führt. Das USV APACHE 3 mit Einstrahlecholot und der auf dem unbemannten Luftfahrzeug installierte LiDAR-Scanner AA450 wurden zur Durchführung von Messungen über und unter Wasser eingesetzt. Darüber hinaus wurde eine GNSS-RTK-Smart-Antenne als Basisstation betrieben.
PHASE 1 - DURCHFÜHRUNG DER BATHYMETRISCHEN VERMESSUNG
Eine bathymetrische Vermessung besteht aus drei Hauptschritten: Vorbereitung, Messung und Datenverarbeitung.
Schritt 1. Vorbereitung.
Da vor der Vermessung kein GNSS-RTK-Netz zur Verfügung stand, ist es notwendig, eine GNSS-Basisstation zu installieren, Passpunkte einzurichten und eine Kalibrierung des Geländes durchzuführen, um eine Referenzkartierung zu erstellen. Für die Vermessung können wir die Route im Voraus in der Software festlegen; dann wird das Boot automatisch entlang der Route vermessen (was in diesem Projekt gemacht wurde), oder wir können die Fernbedienung verwenden, um das Boot während des nächsten Schritts der Vermessung zu steuern.
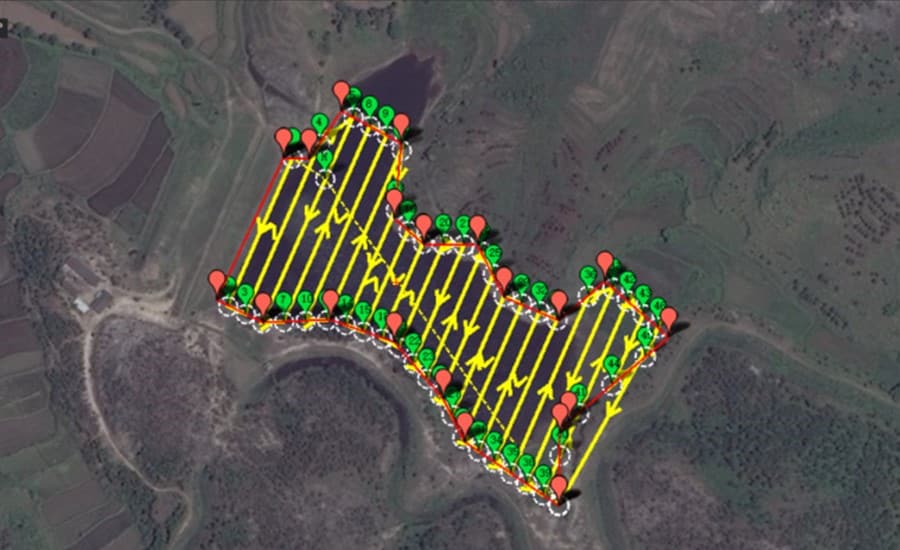
Abbildung 1. Routenplanung für die autonome Navigation des Apache 3 USV.
Schritt 2. Die Messung.
Bei der Messung lokalisierte die Software die Punkte entsprechend der vorgegebenen Route. Der Abstand zwischen den Ankerpunkten der Prüflinie wurde entsprechend der Messproportion verschlüsselt, um sicherzustellen, dass es Konvergenzpunkte mit der Hauptmesslinie innerhalb des vorgegebenen Bereichs gab. Jede Prüflinie wurde mit den Kreuzungspunkten der Hauptmesslinie verglichen.

Abbildung 2. Apache 3 USV Schiffsdrohne mit einem Einstrahlecholot.
Schritt 3. Datenverarbeitung.
Die mit dem Apache 3 USV gelieferte Software CHCNAV HydroSurvey 7 wurde zur Verwaltung der Rohdatenerfassung, Kartierung, Positionierung, Echtzeit-Trajektorienanzeige, Datenverarbeitung und Koordinatensysteme verwendet. Die Software integriert Datenerfassungs- und Nachbearbeitungsfunktionen. Sie unterstützt standardmäßige GPGGA- und SDDPT-Wassertiefendaten sowie das DWG/DXF-Format und bietet Funktionen zum Bearbeiten, Ausblenden und Anzeigen von Ebenen.
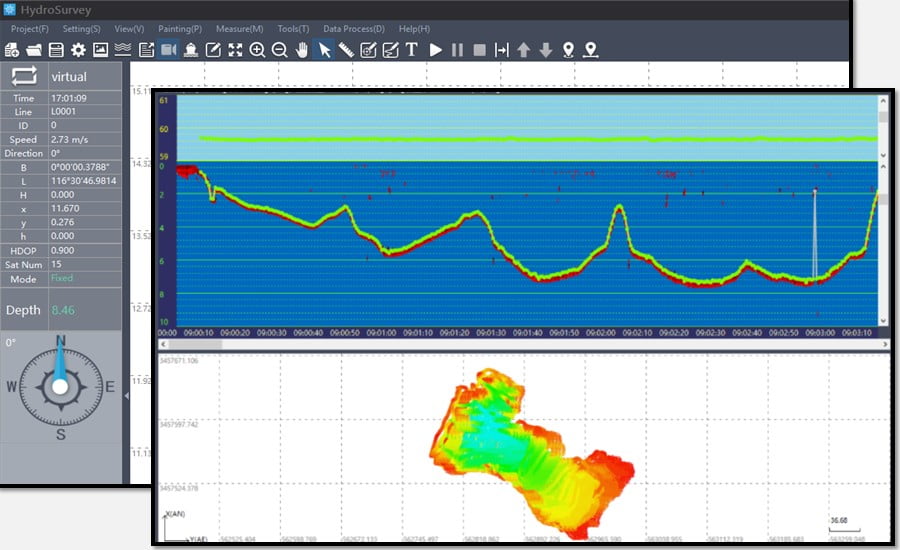
Abbildung 3. Datenverarbeitung in der HydroSurvey-Software.
Entsprechend den verschiedenen Stauraumflächen in unterschiedlichen Höhenlagen wurde die entsprechende Speicherkapazität ermittelt und verarbeitet.
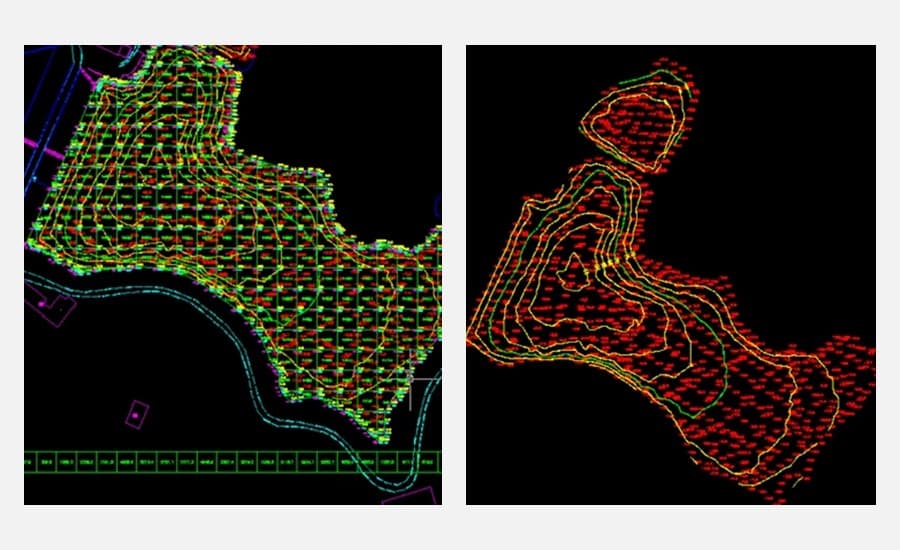
Abbildung 4. Unterwasserhöhe und Berechnung von Stauseefläche und Speicherkapazität.
PHASE 2 - DURCHFÜHRUNG DER VERMESSUNG AUS DER LUFT
Wie in der vorangegangenen Phase gibt es drei Schritte zur Durchführung von Luftbildvermessungen: Vorbereitung, Messung und Datenverarbeitung.
Schritt 1. Vorbereitung.
Vor der Erfassung von Scanner- und Bilddaten mit dem unbemannten Luftfahrzeug (UAV), das das LiDAR+RGB-System (Alpha Air 450) trägt, war die Installation einer GNSS-Basisstation unter freiem Himmel in der Nähe des Projektstandorts erforderlich. Je nach Modell der verwendeten GNSS-Station können Luftvermessungen im Echtzeitmodus oder im Nachbearbeitungsmodus durch Aufzeichnung statischer Daten durchgeführt werden.

Abbildung 5: AlphaAir 450 Lidar (AA450) System mit eingebauter IMU, GNSS, 3D-Scanner und RGB-Kamera.
Schritt 2. Erfassung von LiDAR-Daten und Bildern
Der AA450 LiDAR-Scanner verfügt über ein One-Touch-Workflow-Steuerungssystem, mit dem jede Vermessung mit nur einem Tastendruck verwaltet werden kann. Als die Luftbilddaten für das Projekt erfasst wurden, wurde die CHCNAV CoPre-Software - eine 3D-Laserscanning-Vorverarbeitungssoftware, die mit dem AA450 geliefert wurde - verwendet, um die Daten über ein USB-C-Kabel auf den Computer zu übertragen.
Schritt 3. Verarbeitung der Daten
Im ersten Schritt wurden mit der CoPre-Software die Laserrohdaten und die POS-Daten kombiniert, um georeferenzierte Punktwolkendaten zu erzeugen. In einem zweiten Schritt wurden die rohen Bild- und POS-Daten kombiniert, um ein digitales orthometrisches Modell (DOM) zu erstellen. Die Bodenpunktwolkendaten wurden in der Software CoProcess zur Nachbearbeitung der Realitätserfassung klassifiziert, um das digitale Höhenmodell (DEM) zu erstellen.
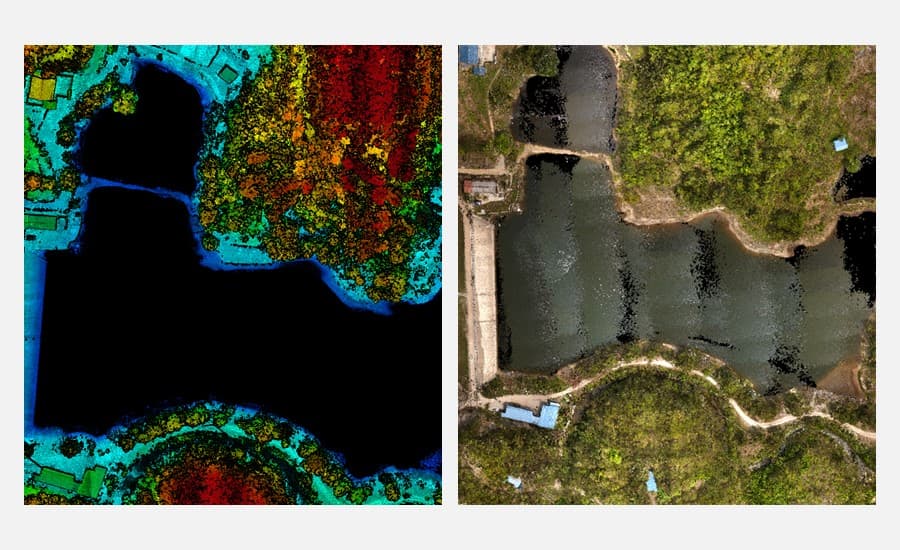
Abbildung 6. Original-Laserpunktwolkendaten (links) und kolorierte Punktwolke (rechts).
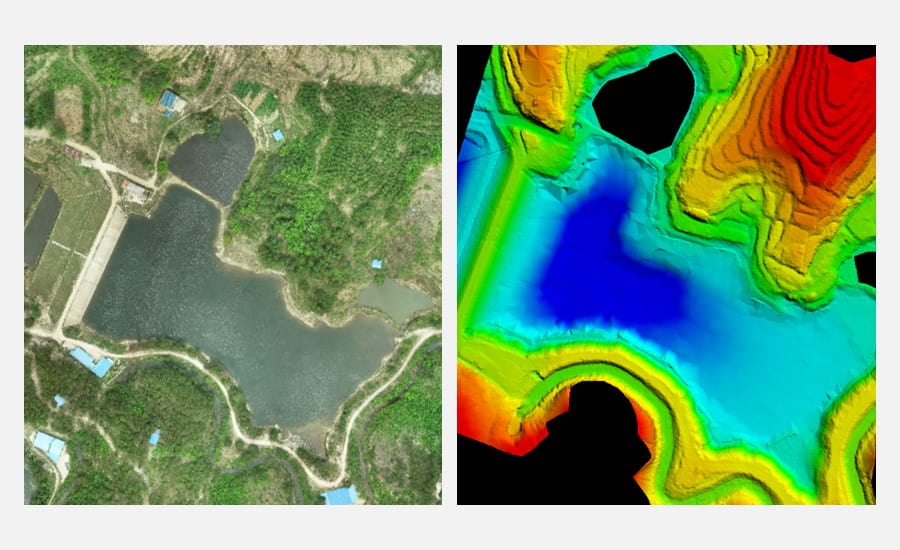
Abbildung 7. Reservoir DOM (links) und DEM (rechts) nach der Datenverarbeitung.
PHASE 3 - BERECHNUNG DER KAPAZITÄT DES WASSERSPEICHERS
In dieser Phase wurde das virtuelle Modell des Stausees erstellt. Der Wasserstand in Metern und das Fassungsvermögen in Kubikmetern wurden effizient und genau berechnet und in einem Diagramm dargestellt.
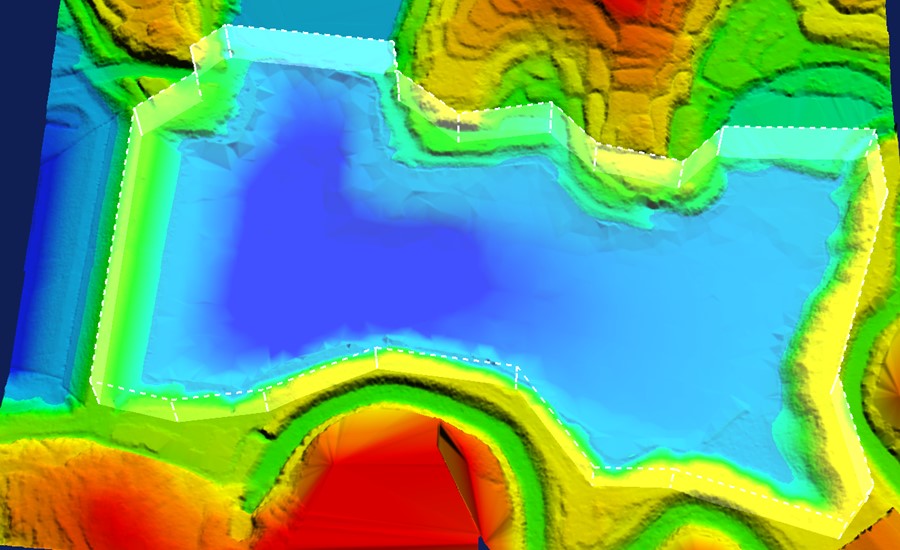
Abbildung 8. 3D-Modellierung des verfügbaren Wassers im Vergleich zum aktuellen Wasserstand.
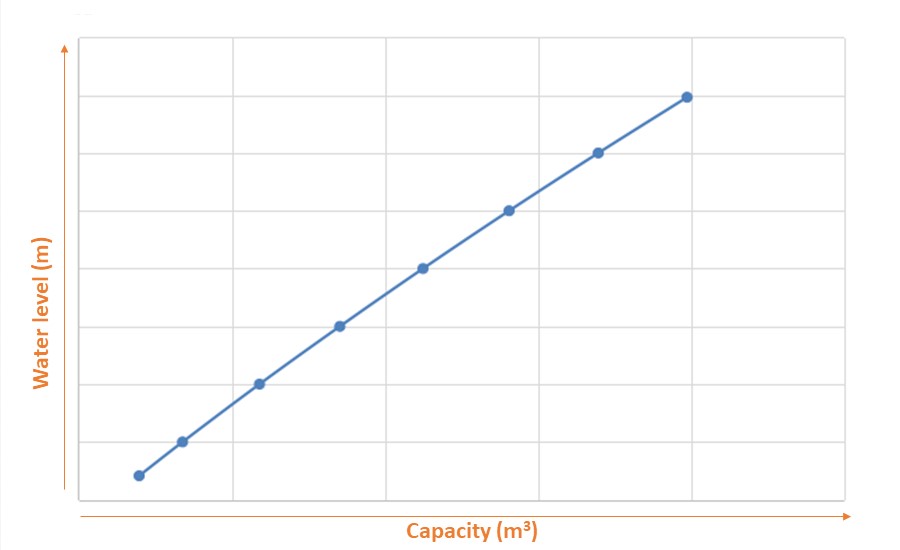
Abbildung 9. Diagramm der Wasserkapazität des Stausees.
Durch den Einsatz neuer Technologien wie LIDAR-Scanner, Drohnen und USVs ist es nun möglich, den Genauigkeitsgrad und den Zeitaufwand für die Erfassung der Topografie des Stausees und die Berechnung seiner Speicherkapazität zu verbessern. Dadurch werden die Vermessungskosten erheblich gesenkt und die Effizienz des langfristigen Instandhaltungsprozesses verbessert. Mit dem digitalen Modell des Stausees können Vermessungs- und Kartierungsergebnisse angereichert und zukünftige Entwicklungen simuliert, überwacht und prognostiziert werden.
___
Über CHCNAV
CHC Navigation (CHCNAV) entwickelt innovative GNSS-Navigations- und Positionierungslösungen, um die Arbeit der Kunden effizienter zu gestalten. Die Produkte und Lösungen von CHCNAV decken zahlreiche Branchen ab, z. B. Geodaten, Bauwesen, Landwirtschaft und Schifffahrt. Mit einer weltweiten Präsenz, Vertriebspartnern in mehr als 120 Ländern und mehr als 1.500 Mitarbeitern ist CHC Navigation heute als eines der am schnellsten wachsenden Unternehmen im Bereich der Geomatik-Technologien anerkannt.
Haben Sie eine Frage zu unseren Lösungen oder Händlermöglichkeiten?
