Geoespacial
Aporte precisión a sus proyectos geoespaciales con CHC Navigation.
Más información + Ir a Geoespacial2022-08-19
La gestión de grandes embalses de agua puede resultar complicada con el paso del tiempo debido a la inexactitud o desactualización de la información geográfica, lo que da lugar a discrepancias entre los datos reales y los del diseño inicial. Para mantener eficazmente los embalses, es esencial utilizar métodos de medición avanzados, como la cartografía con escáneres LiDAR y vehículos no tripulados que ayudan a proporcionar oportunamente un seguimiento y cálculo precisos del volumen de almacenamiento de agua, así como la previsión y simulación de las condiciones hidrológicas.
SOBRE EL PROYECTO
En este proyecto de un día de duración, se demostró que el uso de un USV hidrográfico para obtener cartografía submarina y un vehículo aéreo no tripulado equipado con un escáner LiDAR para obtener los límites de los embalses y datos topográficos da como resultado una gestión simplificada y eficiente de los grandes embalses de agua. El USV APACHE 3 con ecosonda monohaz y el escáner LiDAR AA450 instalado en el vehículo aéreo no tripulado se utilizaron para realizar mediciones por encima y por debajo del nivel del agua. Además, se utilizó una antena inteligente GNSS RTK como estación base.
FASE 1 - REALIZACIÓN DEL ESTUDIO BATIMÉTRICO
Un estudio batimétrico consta de tres fases principales: preparación, medición y procesamiento de datos.
Fase 1. Preparación. Preparación.
Antes del levantamiento, al no disponer de una red GNSS RTK, es necesario instalar una estación base GNSS, establecer puntos de control y realizar una calibración del emplazamiento para establecer una cartografía de referencia. Para los objetivos de medición, podemos establecer la ruta en el software de antemano; entonces, el barco se medirá automáticamente a lo largo de la ruta (lo que se hizo en este proyecto), o podemos utilizar el control remoto para operar el barco durante el siguiente paso de esta encuesta.
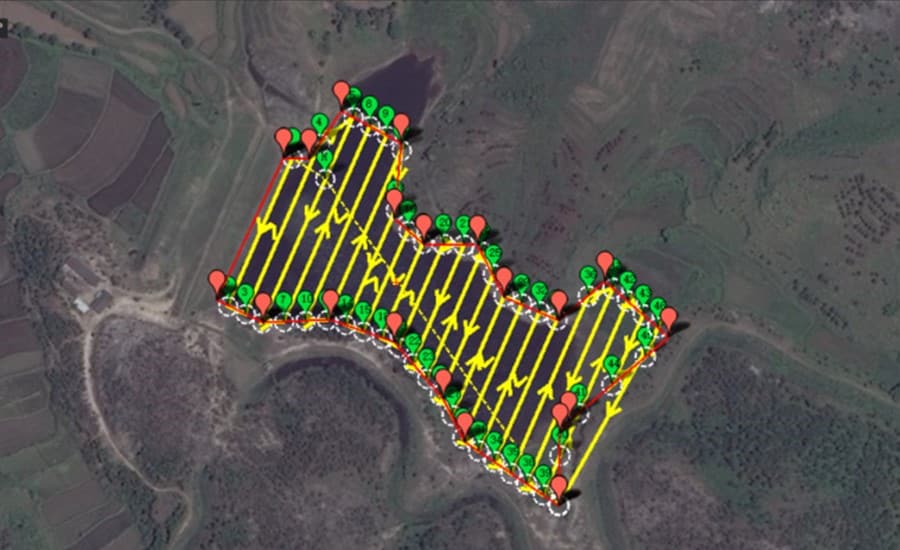
Figura 1. Planificación de la ruta para la navegación autónoma del USV Apache 3.
Paso 2. Medición. Medición.
En el proceso de medición, el software localizó los puntos de acuerdo con la ruta prescrita. La distancia entre los puntos de anclaje de la línea de inspección se codificó según la proporción de medición para garantizar que hubiera puntos de convergencia con la línea de inspección principal dentro del intervalo especificado. Cada línea de inspección se comparó con los puntos de cruce de la línea de inspección principal.

Figura 2. Dron marino USV Apache 3 con ecosonda monohaz.
Paso 3. Procesamiento de datos.
El software CHCNAV HydroSurvey 7, suministrado con el USV Apache 3, se utilizó para gestionar la recogida de datos brutos, la cartografía, el posicionamiento, la visualización de la trayectoria en tiempo real, el procesamiento de datos y los sistemas de coordenadas. El software integra funciones de adquisición y postprocesado de datos. Admite datos estándar de profundidad del agua GPGGA y SDDPT y formato DWG/DXF, con funciones de edición, ocultación y visualización de capas.
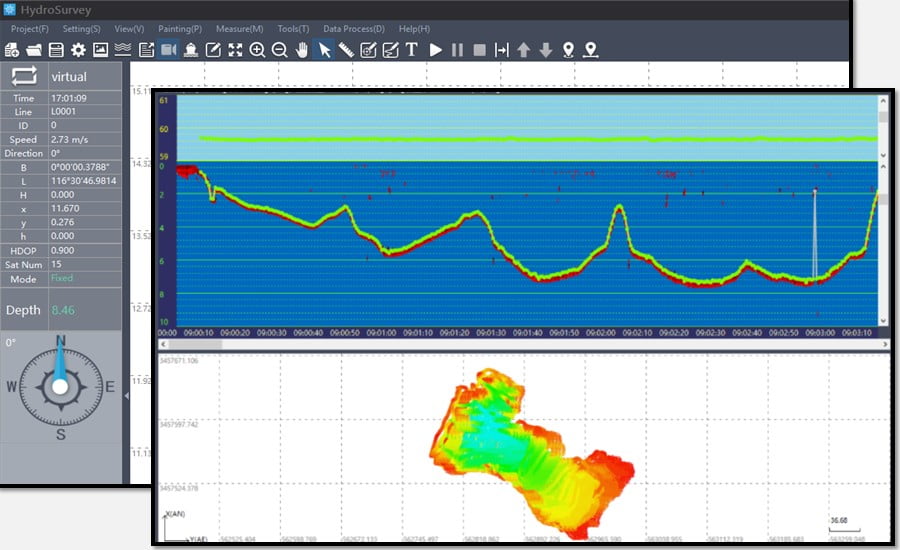
Figura 3. Procesamiento de datos en el software HydroSurveyProcesamiento de datos en el software HydroSurvey.
De acuerdo con las diferentes áreas de embalse bajo diferentes elevaciones, se obtuvo y procesó la capacidad de almacenamiento correspondiente.
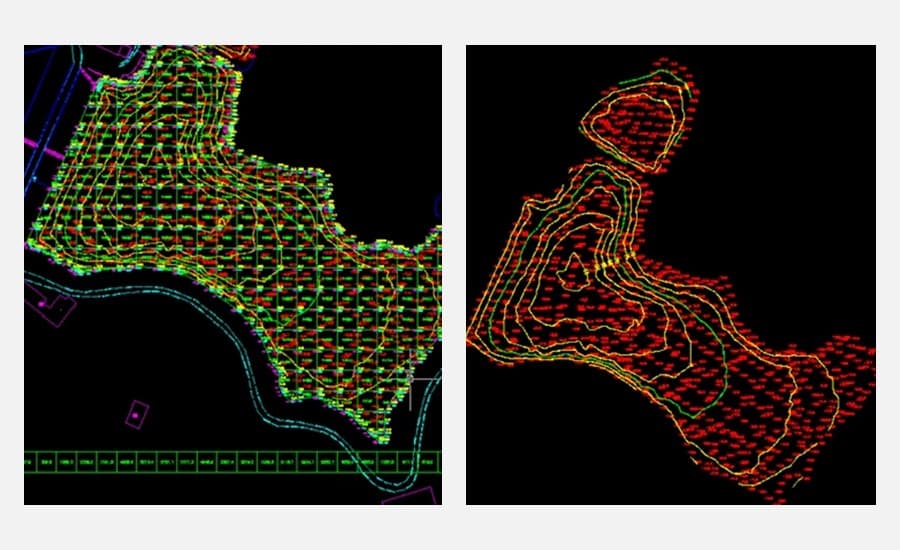
Figura 4 Elevación bajo el agua y cálculo de la superficie del embalse y la capacidad de almacenamiento.
FASE 2 - REALIZACIÓN DEL RECONOCIMIENTO AÉREO
Al igual que en la fase anterior, la realización de levantamientos aéreos consta de tres etapas: preparación, medición y procesamiento de datos.
Paso 1. Preparación. Preparación.
Antes de recopilar datos de escáner e imágenes con el vehículo aéreo no tripulado (UAV) que transporta el sistema LiDAR+RGB (Alpha Air 450), fue necesario instalar una estación base GNSS en cielo abierto cerca del lugar del proyecto. Dependiendo del modelo de estación GNSS utilizado, los levantamientos aéreos pueden realizarse en modo de tiempo real o en modo de postprocesamiento mediante el registro de datos estáticos.

Figura 5. Sistema AlphaAir 450 Lidar (AA450) con IMU integrada, GNSS, escáner 3D y cámara RGB.
Paso 2. Adquisición de datos e imágenes LiDAR Adquisición de datos e imágenes LiDAR
El escáner LiDAR AA450 cuenta con un sistema de control de flujo de trabajo de un solo toque que permite gestionar cualquier levantamiento con solo pulsar un botón. Cuando se recopilaron los datos aéreos para el proyecto, se utilizó el software CHCNAV CoPre -un software de preprocesamiento de escaneo láser 3D suministrado con el AA450- para transferir los datos al ordenador a través de un cable USB-C.
Paso 3. Procesamiento de datos
En el primer paso, el software CoPre se utilizó para combinar los datos láser en bruto y los datos POS para generar datos de nubes de puntos georreferenciados. En un segundo paso, la imagen en bruto y los datos POS se combinaron para generar un modelo ortométrico digital (DOM). Los datos de la nube de puntos del terreno se clasificaron en el software de posprocesamiento de captura de la realidad CoProcess para generar el modelo digital de elevación (MDE).
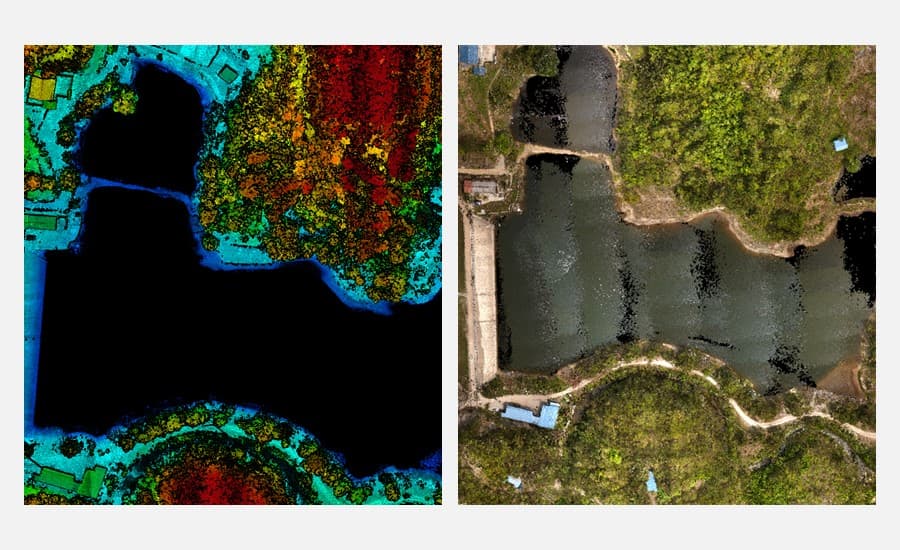
Figura 6. Datos originales de la nube de puntos láser (izquierda) y nube de puntos coloreada (derecha).
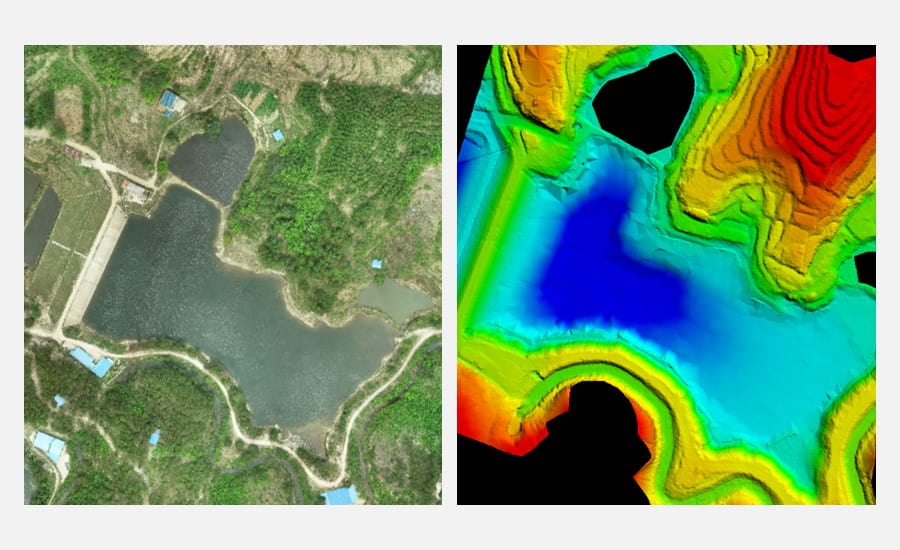
Figura 7. DOM del yacimiento (izquierda) y DEM (derecha) tras el tratamiento de los datos.
FASE 3 - CÁLCULO DE LA CAPACIDAD DEL EMBALSE
En esta fase se creó el modelo virtual del embalse. El nivel de agua en metros y la capacidad en metros cúbicos se calcularon con eficacia y precisión y se presentaron en el diagrama.
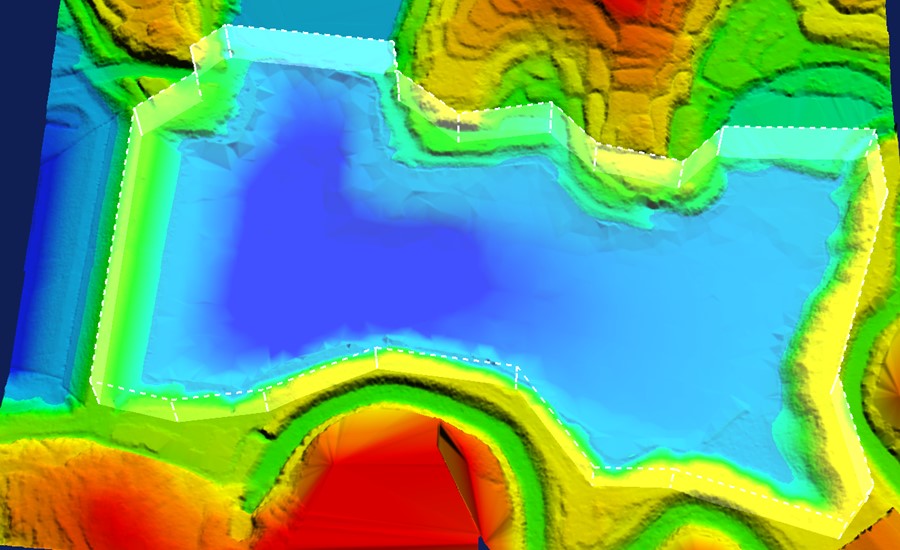
Figura 8. Modelado 3D del agua disponible comparado con el nivel de agua actual.
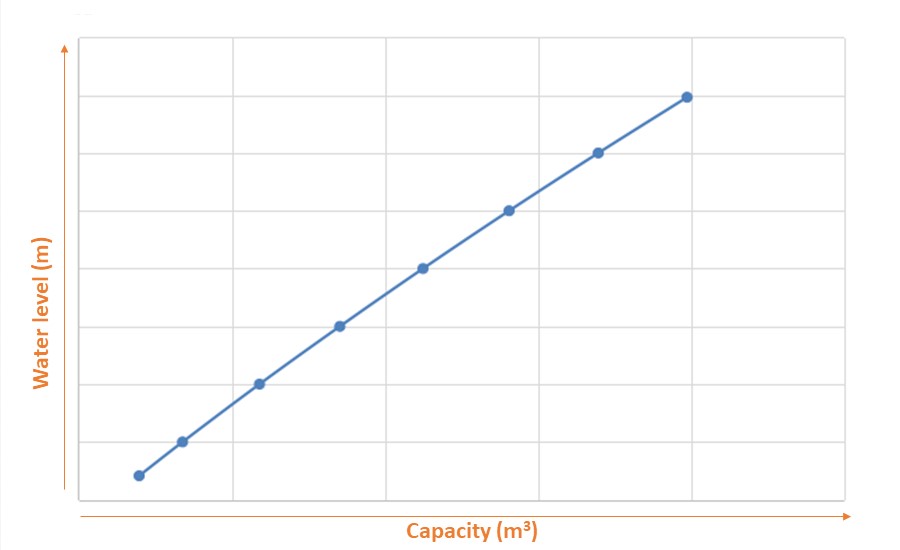
Figura 9. Diagrama de la capacidad de agua del embalse.
Gracias al uso de nuevas tecnologías, como escáneres LIDAR, drones y USV, ahora es posible mejorar el nivel de precisión y el tiempo empleado en adquirir la topografía del embalse y calcular su capacidad de almacenamiento. Como resultado, se reducen significativamente los costes de medición y se mejora la eficacia del proceso de mantenimiento a largo plazo. El modelo digital del yacimiento permite enriquecer los resultados de las prospecciones y la cartografía, así como simular, supervisar y prever la evolución futura.
___
Acerca de CHCNAV
CHC Navigation (CHCNAV) crea soluciones innovadoras de navegación y posicionamiento GNSS para que el trabajo de los clientes sea más eficaz. Los productos y soluciones de CHCNAV abarcan múltiples sectores, como el geoespacial, la construcción, la agricultura y la marina. Con presencia en todo el mundo, distribuidores en más de 120 países y más de 1.500 empleados, CHC Navigation está reconocida hoy como una de las empresas de tecnologías geomáticas de más rápido crecimiento.
¿Tiene alguna pregunta sobre nuestras soluciones u oportunidades de negocio?
