Comment créer le modèle numérique d'un bassin en une seule journée

La gestion des grands bassins d’irrigation peut s'avérer difficile au fil du temps en raison de l'inexactitude ou de l'obsolescence des informations géographiques, ce qui entraîne des écarts entre les données réelles et les données de conception initiales. Pour les entretenir efficacement, il est essentiel d'utiliser des méthodes de mesure avancées, telles que la topographie et la cartographie à l'aide de scanners LiDAR et de véhicules autonomes, qui permettent d'assurer en temps voulu une surveillance et un calcul précis du volume de stockage de l'eau ainsi que la prévision et la simulation des conditions hydrologiques.
A PROPOS DU PROJET
Dans ce projet d'une journée, il a été démontré que l'utilisation d'un USV hydrographique pour obtenir une cartographie sous-marine et d'un drone équipé d'un scanner LiDAR pour obtenir les limites du réservoir et les données topographiques, permet une gestion simplifiée et efficace des grands bassins de rétention d'eau.
L'USV APACHE 3 avec sondeur mono-faisceau et le scanner LiDAR AA450 installé sur le drone ont été utilisés pour effectuer des mesures au-dessus et au-dessous du niveau de l'eau. En outre, une antenne GNSS RTK a été utilisée comme station de base.
PHASE 1 - RÉALISATION DU RELEVÉ BATHYMÉTRIQUE
Le levé bathymétrique comprend trois étapes principales : la préparation, la mesure et le traitement des données.
Étape 1. Préparation.
Avant le levé, comme aucun réseau GNSS RTK n'était disponible, il a été nécessaire d'installer une station de base GNSS, de mettre en place des points de contrôle et d'effectuer une calibration du site pour établir un référentiel cartographique.
Pour réaliser les levés, l'itinéraire est défini dans le logiciel à l'avance ; ensuite, le bateau effectuera les mesures automatiquement le long de l'itinéraire (ce qui a été fait dans ce projet), ou une télécommande peut être utilisée pour faire naviguer le drone marin pendant la prochaine étape du levé.
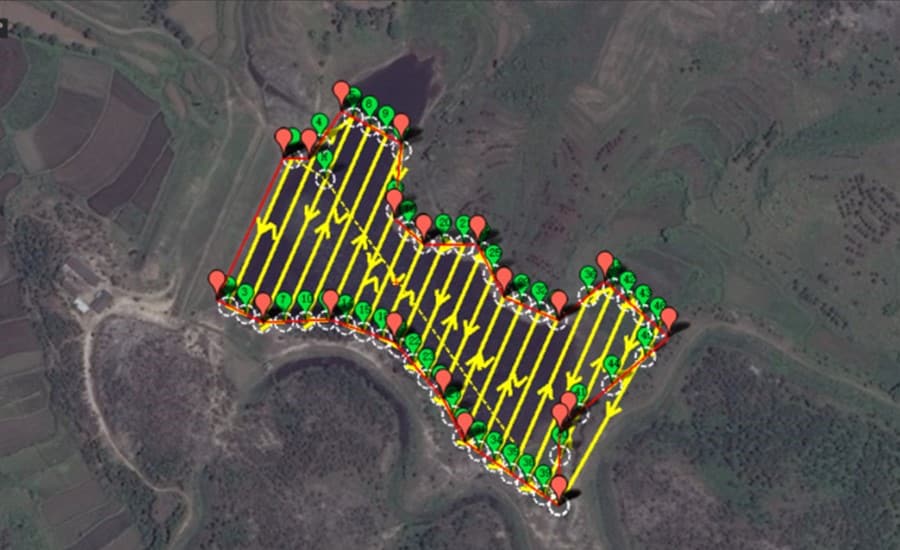
Figure 1 : La planification de l'itinéraire pour la navigation autonome de l’USV Apache 3.
Étape 2. Mesure.
Au cours du processus de mesure, le logiciel a localisé les points en fonction de l'itinéraire prescrit. La distance entre les points d'ancrage de la ligne de référence a été calculée en fonction de l’espacement des mesures afin de s'assurer que les points de convergence avec la ligne de référence principale se trouvaient dans la plage spécifiée. Chaque ligne de levé a été comparée aux points de passage de la ligne de levé principale.

Figure 2 : L'Apache 3 USV, un drone marin portable équipé d'un échosondeur mono-faisceau, effectue un relevé hydrographique.
Étape 3. Traitement des données.
Le logiciel HydroSurvey 7 de CHCNAV, fourni avec le USV Apache 3, a été utilisé pour gérer la collecte des données brutes, la cartographie, le positionnement, l'affichage de la trajectoire en temps réel, le traitement des données et les systèmes de coordonnées.
Le logiciel intègre des fonctions d'acquisition et de post-traitement des données. Il prend en charge les données de profondeur d'eau GPGGA et SDDPT et le format DWG/DXF, avec en plus des capacités d'édition, de masquage et d'affichage des couches.
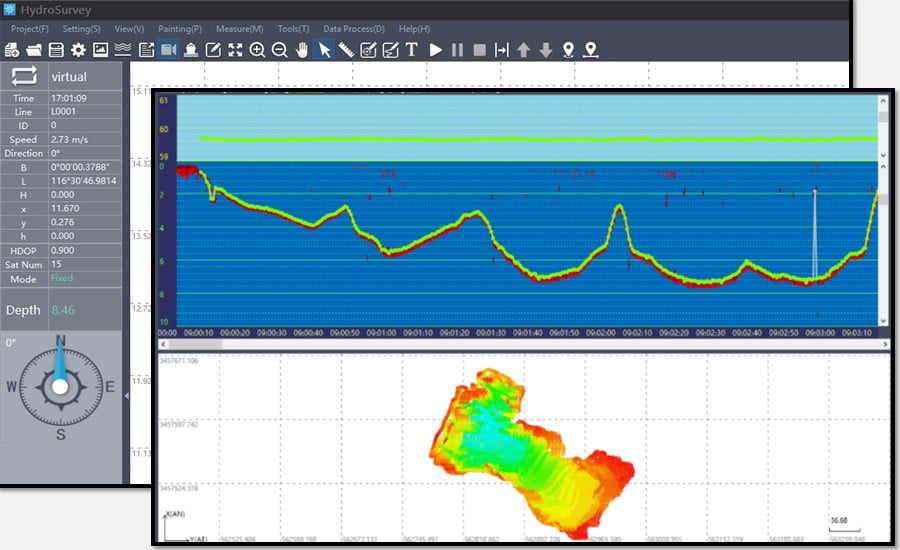
Figure 3 : Traitement des données dans le logiciel HydroSurvey.
La capacité de stockage correspondante a été obtenue et traitée en fonction des différentes zones de réservoirs situées à des altitudes différentes.
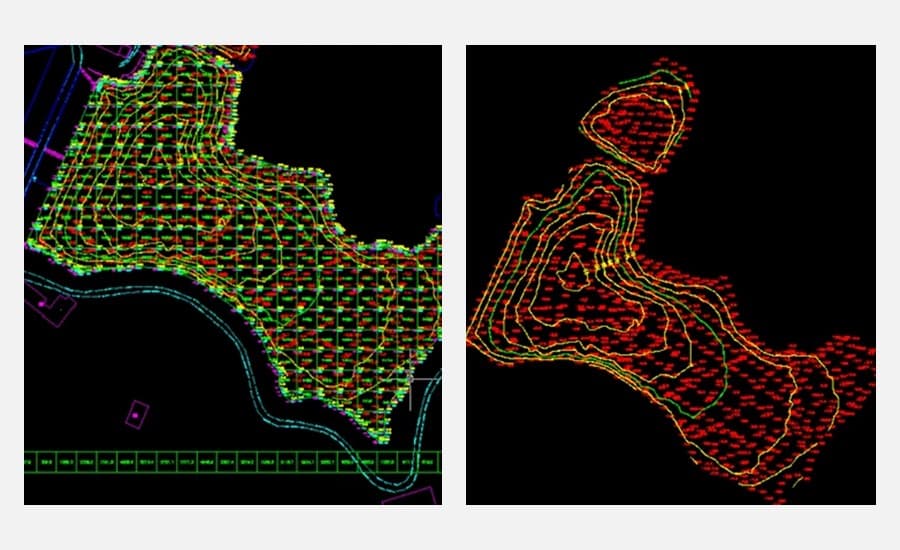
Figure 4 : Élévation sous-marine et calcul de la superficie du réservoir et de la capacité de stockage.
PHASE 2 - RÉALISATION DU LEVÉ AÉRIEN
Comme pour la phase précédente, la réalisation des relevés aériens se fait en trois étapes : la préparation, la mesure et le traitement des données.
Étape 1. Préparation.
Avant de collecter les données du scanner et de l'image avec le drone transportant le système LiDAR+RGB (Alpha Air 450), il était nécessaire d'installer une station de base GNSS dans un lieu dégagé à proximité du site du projet.
Selon le modèle de la station GNSS utilisée, les relevés aériens peuvent être effectués en mode temps réel ou en mode post-traitement par l'enregistrement de données statiques.

Figure 5 : Le système Lidar AlphaAir 450 (AA450) avec IMU, GNSS, scanner 3D et caméra RGB intégrés.
Étape 2. Acquisition de données et d'images LiDAR
Le scanner LiDAR AA450 est doté d'un système de contrôle du flux de travail simplifié qui permet de gérer n'importe quel levé en appuyant sur un seul bouton.
Lorsque les données aériennes du projet ont été collectées, le logiciel CHCNAV CoPre - un logiciel de prétraitement de données laser 3D fourni avec l'AA450, a été utilisé pour transférer les données vers l'ordinateur via un câble USB-C.
Étape 3. Traitement des données
Dans un premier temps, le logiciel CoPre a été utilisé pour associer les données laser brutes et les données POS afin de générer des données de nuages de points géoréférencés. Dans un deuxième temps, l'image brute et les données POS ont été combinées pour générer un modèle orthométrique numérique (DOM). Les données du nuage de points au sol ont été filtrées dans le logiciel de post-traitement de capture de réalité CoProcess pour générer le modèle numérique d'élévation (MNE).
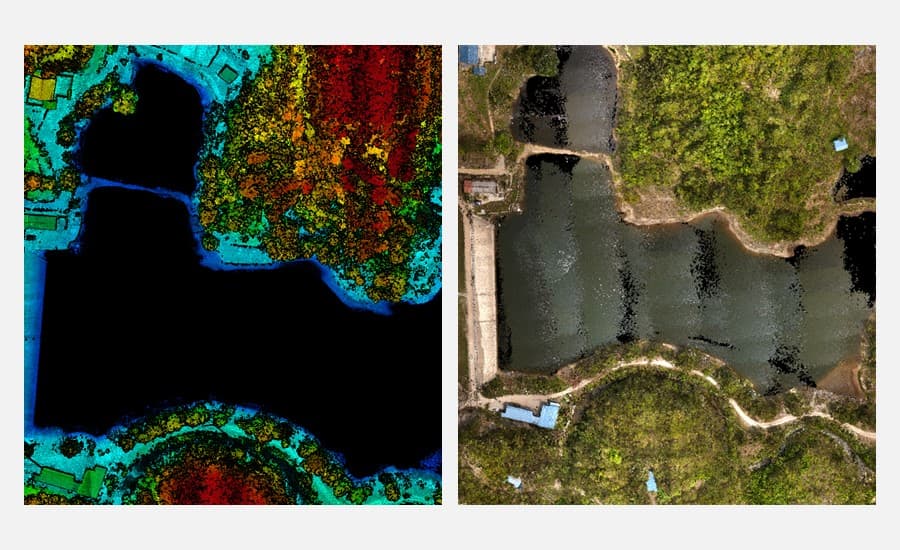
Figure 6 : Les données originales du nuage de points laser (à gauche) et le nuage de points colorisé (à droite).
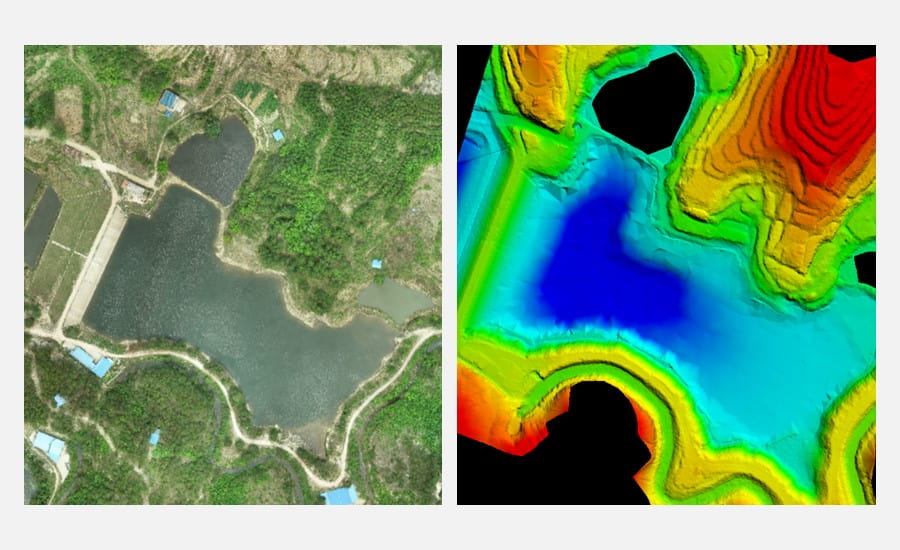
Figure 7 : DOM du réservoir (à gauche) et le MNE (à droite) après traitement des données.
PHASE 3 - CALCUL DE LA CAPACITÉ DU RÉSERVOIR D'EAU
A ce stade, le modèle virtuel du réservoir a été créé. Le niveau d'eau en mètres et la capacité en mètres cubes ont été calculés de manière efficace et précise tel que présenté sur le diagramme.
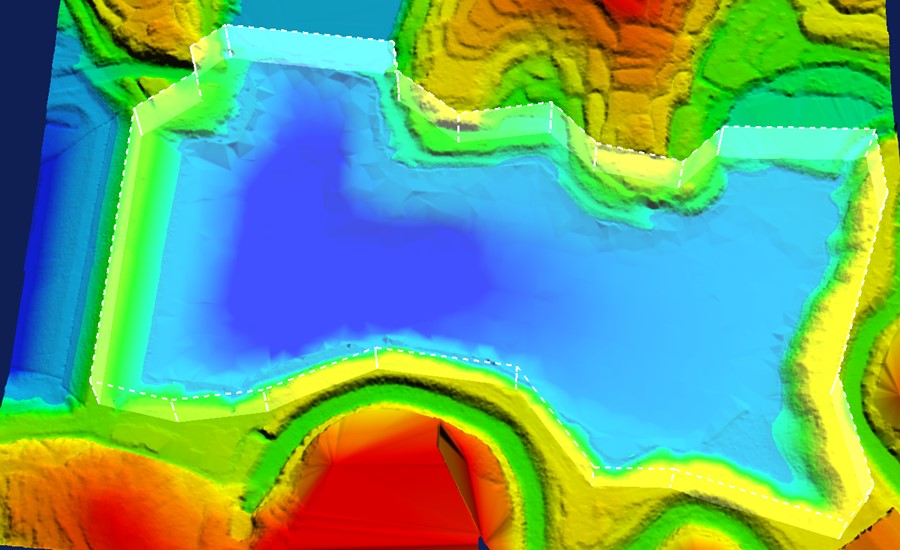
Figure 8 : La modélisation 3D de la quantité d'eau disponible par rapport au niveau d'eau actuel.
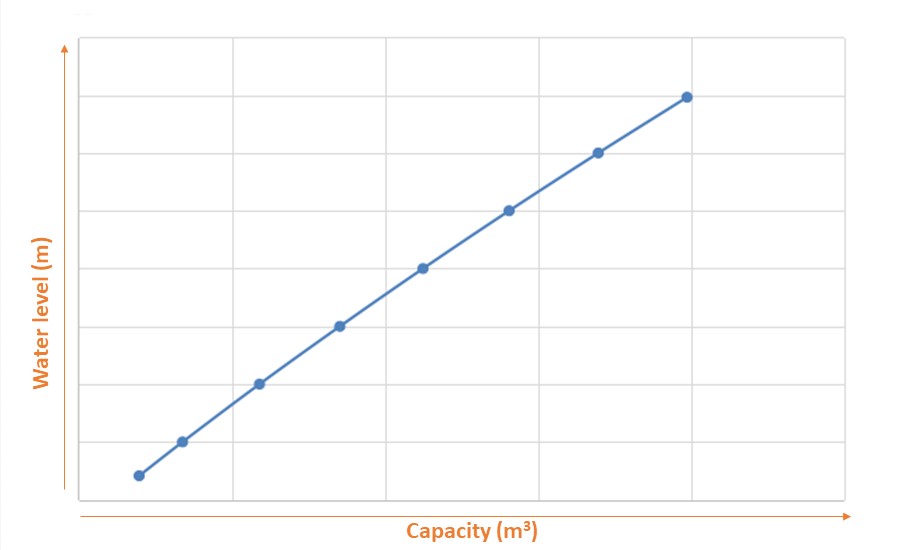
Figure 9 : Diagramme de la capacité en eau du réservoir.
Grâce aux nouvelles technologies, telles que les scanners LIDAR, les drones et les USV, il est désormais possible d'améliorer le niveau de précision et le temps consacré à l'acquisition de la topographie des bassins et retenues d’eau et au calcul de leur capacité de stockage. En conséquence, les coûts de levés sont considérablement réduits et l'efficacité du processus de maintenance à long terme est améliorée. Le modèle numérique des bassins permet d'enrichir les résultats des levés et de la cartographie, et de simuler, surveiller et prévoir les aménagements futurs.
___
A propos de CHCNAV
CHC Navigation (CHCNAV) crée des solutions innovantes de navigation et de positionnement GNSS pour rendre le travail des clients plus productif. Les produits et solutions CHCNAV couvrent de multiples secteurs tels que le géospatial, la construction, l'agriculture de précision et l’hydrographie. Avec une présence mondiale et des distributeurs dans plus de 120 pays et plus de 1,500 employés, CHC Navigation est aujourd'hui reconnue comme l'une des entreprises à la croissance la plus rapide dans le domaine des technologies géomatiques. Pour plus d'informations sur CHC Navigation [Huace:300627.SZ], visitez notre site: https://chcnav.com/fr/about-us/overview

